多机协同 Kilobot分析
简介
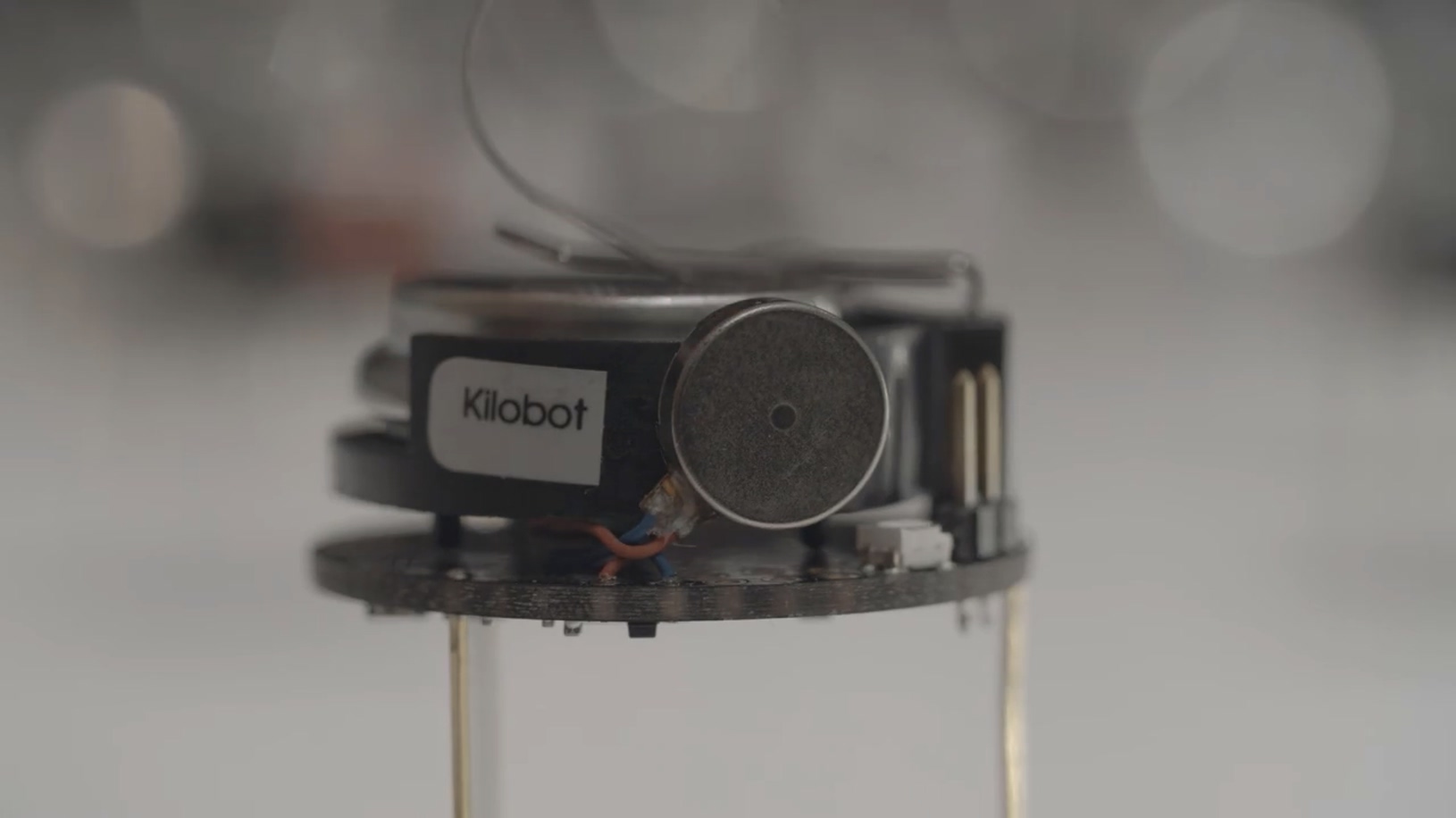
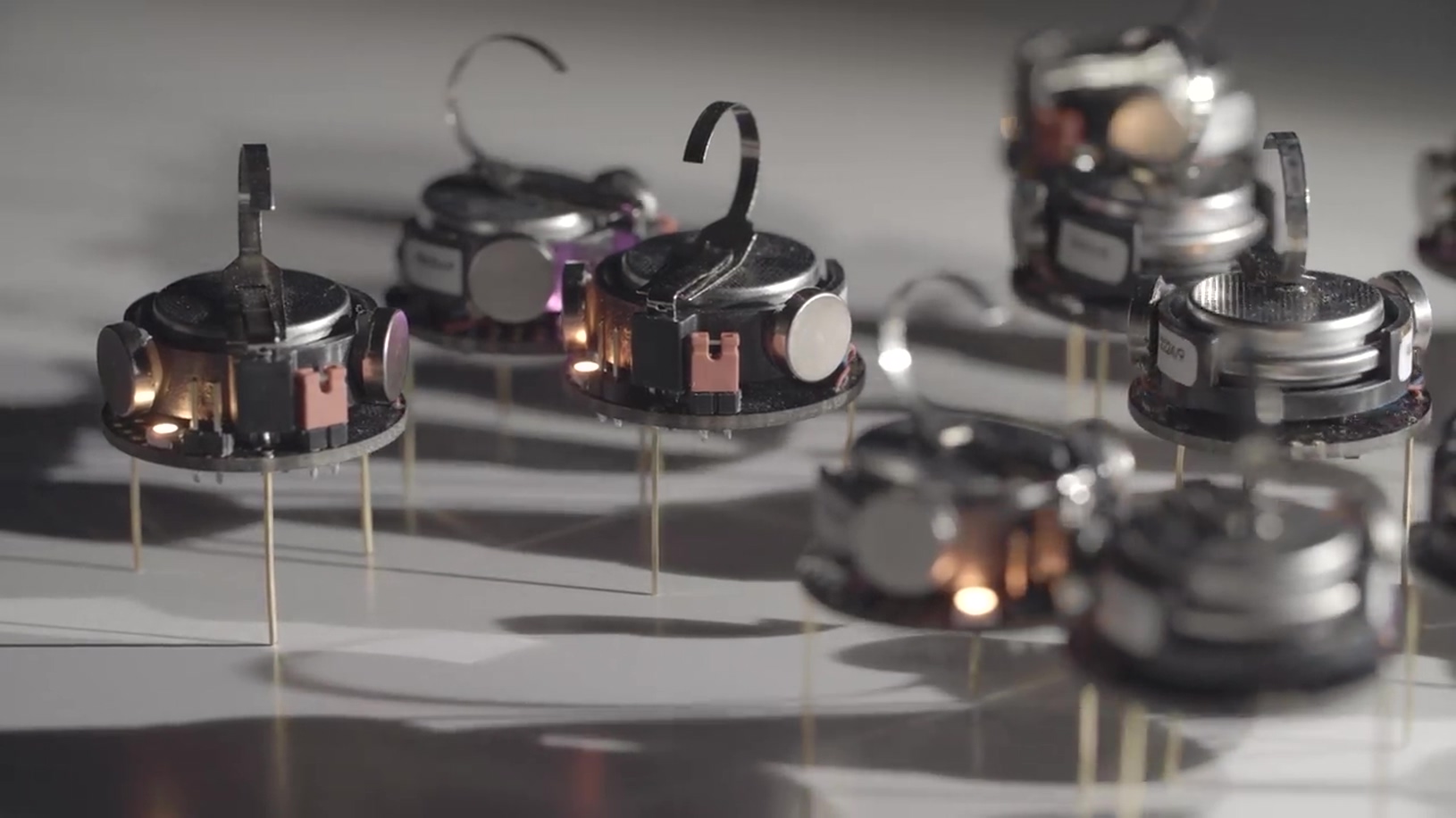
kilobot是哈佛大学生物工程研究所制造的一种微型机器人,这种微型机器人被命名为Kilobot,大小跟硬币差不多,每个机器人都装有一个小型微处理器、一个红外传感器以及一个通过震动来完成移动的马达。
这些Kilobot就像小蚂蚁一样,能够在简单命令下自动排列出五角星、“K”字样以及扳手图案。此项目的负责人MichaelRubenstein与团队开发了一种编程模式,允许这一大群机器人找到彼此,并相互协作共同完成一个任务而无需即时及详细地说明。“它们可以自动变换形状来适应当前的任务。
整体思路
达到一千多这种足够多的数量,当有一千个群组机器人时,单个机器人的重要性几乎降低到零,虽然某几个机器人可能会出现故障或当机,但是机器人数量如此之大,机器人群组的集体行为趋势并没有改变,因此也没有造成任何影响。
在生物系统中,群组织控制是根据一套非常简单的规则。对于Kilobots,组织形状的算法也是基于类似的一套简单功能。
| 类别 | 说明 |
|---|---|
| 跟踪边缘 | 机器人可以通过测量到边缘机器人的距离沿着群组的边缘进行移动 |
| 梯度阵列 | 初始机器人生成一个带有梯度值的信息随着在群组中传播而递增,让每个机器人知道与初始机器人之间的距离。 |
| 定位 | 机器人可以通过和邻居通信以及测量和其之间的距离来组建一个本地定位系统 |
定位
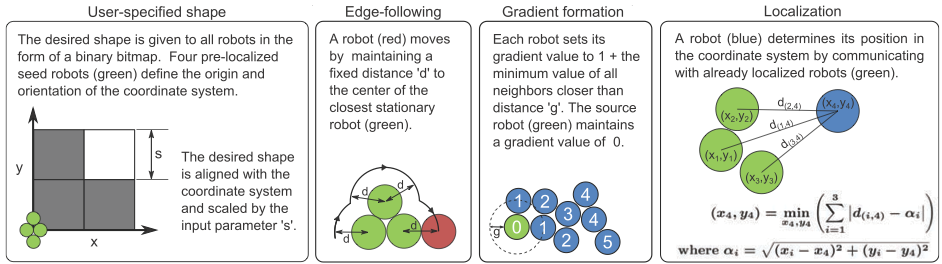
在这些功能中,定位是最困难也是最重要的。机器人通过从桌面反射后的红外进行通信,同样通过检测红外光的强度来测量机器人之间的距离:光亮度越小距离越远。但是他们并不确定光是从什么地方过来的。因此就需要用到定位,他们通过一个初始的“种子”机器人组来定义定位系统的原点,随后的机器人就可以通过至少三个已经定位好的机器人的红外光照强度进行定位了。
组合
- 用户发送给机器人的确定的图形形状。
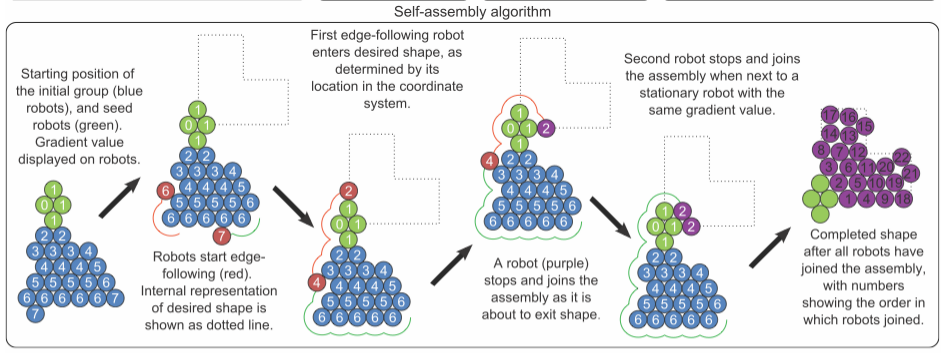
- 这个算法基于三个基本的集体行为:跟踪边缘,梯度阵列和定位。
- 一组机器人根据用户定义的形状进行群组自组合。
- 一旦机器人定位好后,组建成任何形状的图案都是相对简单直接的:机器人围绕着群组的边缘移动一直到检测到已经进入图形区域中。然后,每个机器人继续沿着形状边缘移动一直到检测到即将走出形状或者碰到前面的机器人。也就是说:机器人根据这个简单的规则一直移动,直到形状组建完成。
结构
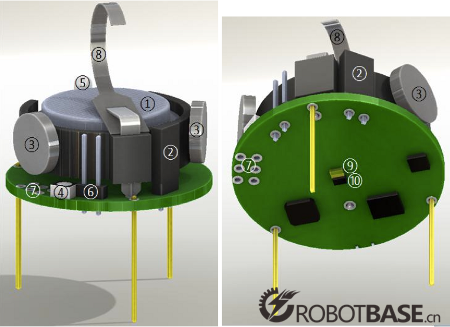
| 序号 | 说明 | 序号 | 说明 |
|---|---|---|---|
| 1 | 3.7V电池 | 6 | 串口输出接口 |
| 2 | 电源跳线 | 7 | 编程接口 |
| 3 | 振动电机 | 8 | 充电销 |
| 4 | RGB灯 | 9 | 红外发射器 |
| 5 | 环境光传感器 | 10 | 红外接收器 |
kilobot视屏
仿真
kbsim项目
代码地址:ajhalme/kbsim: Kilobot simulator (github.com)
kilombo项目
代码地址:JIC-CSB/kilombo: Kilobot simulator in C (github.com)
论文
自组织系统研究小组-Harvard University,US(kilobot创始团队)
团队网站:Self-Organizing Systems Research Group (harvard.edu)
Programmable self-assembly in a thousand-robot swarm
- 链接:检索网址,PDF地址
- 期刊时间:Science2014
- 自组装使自然界能够通过大量有限和不可靠的个体的相互作用,建立复杂的形态,从多细胞有机体到复杂的动物结构,如鸟群。在工程系统中创造这种能力,对能够在这种规模下运行的算法和物理系统的设计都提出了挑战。我们设计了一个系统,展示了复杂的二维形状的可编程自组装与一千机器人群。这是通过创造自主机器人来实现的,自主机器人被设计成在大群体中工作,并通过局部交互进行合作,同时开发出一种对大规模分散系统的可变性和误差特性具有高度鲁棒性的形状形成集体算法。这项工作提出了创造具有自然群体能力的人工群体的目标。
- 自组装使自然界能够通过大量有限的和不可靠的个体的相互作用,建立复杂的形式,从多细胞生物到复杂的动物结构,如鸟群。在工程系统中创造这种能力,对可以在这种规模下运行的算法和物理系统的设计都提出了挑战。我们报告了一个系统,该系统展示了由上千台机器人组成的复杂的二维形状的可编程自组装。这是由创建自主机器人来实现的,这些机器人被设计成在大型群体中运作,并通过局部互动进行合作,同时开发了一个集体的形状形成算法,该算法对大规模分散系统的可变性和错误特征具有高度的鲁棒性。
- 自组装使自然界能够建立复杂的形式,从多细胞生物体到复杂的动物结构,如鸟群。 复杂的动物结构,如鸟群,都是通过大量有限的、不可靠的个体之间的相互作用而形成的。 和不可靠的个体的相互作用。在工程系统中创造这种能力,对算法和物理系统的设计提出了挑战。 设计能够在这种规模下运行的算法和物理系统的挑战。我们报告了一个 系统,该系统展示了复杂的二维形状的可编程的自我组装 这是通过创建自主机器人来实现的,这些机器人被设计成可以在大群体中运作,并通过合作来实现。 这是通过创造自主机器人来实现的,这些机器人被设计成能在大群体中运作,并通过局部互动进行合作,以及通过开发一个 形状形成的集体算法,该算法对大规模分散系统的可变性和错误具有高度鲁棒性。 这项工作推动了创建具有自然界中机器人能力的人工群的目标。 这项工作推动了创建具有自然群组能力的人工群组的目标。
- 自我组装使自然能够从多细胞生物到复杂构建复杂的形式 动物结构如鸟群,通过广大有限的互动 和不可靠的个人。 在工程系统中创造这种能力在挑战挑战 可以在这种尺度上运行的两种算法和物理系统的设计。 我们报告A. 显示复杂二维形状的可编程自组装的系统 通过创建自治机器人设计的一千机器人群。 在大型群体中运营,并通过当地互动和开发 形状形成的集体算法,对变异性和误差具有高强度 大规模分散系统的特征。这项工作推进了创造的目的 具有自然能力的人工群。
Error Cascades in Collective Behavior A Case Study of the Gradient Algorithm on 1000 Physical Agents
- 链接:检索网址,PDF地址
- 期刊时间:AAMAS2017
- 概要:梯度,或称跳数,算法的灵感来自自然现象,如多细胞发育中的形态梯度。它在多智能体系统和传感器网络中有多种应用,可作为自组织坐标系形成的基础,也可用于寻找信息传递的最短路径。这是一个简单且在理论上易于理解的算法。然而,我们在此表明,在实践中,它对在更大范围内出现的特定的罕见错误高度敏感。我们在一个由1000个物理智能体(Kilobot机器人)组成的系统上实现它,这些智能体通过一个嘈杂的无线信道异步通信。我们观察到,单个智能体产生的自发的、持续时间短的罕见错误(例如,由于消息损坏)在空间和时间上传播,导致严重阻碍算法功能的级联。我们建立了时间误差传播的数学模型,并在100个智能体上进行了实验验证。这项工作表明,从理论上讲,多智能体算法被认为是简单和健壮的,但在物理系统上实现却具有很大的挑战性。系统地理解和量化它们当前的局限性是朝着提高其实现健壮性的方向迈出的第一步。
Multi-Feature Collective Decision Making in Robot Swarms
- 链接:检索网址,PDF地址
- 期刊时间:AAMAS2017
- 概要:由于群体决策在蜜蜂和蚁群等生物系统中的广泛应用,它在多智能体系统和群体机器人领域得到了广泛的研究。然而,以往的研究大多集中在单个特征的集体决策上。这项工作引入并研究了多特征集合决策问题,其中一个集合必须同时决定多个二元特征,而没有关于它们的相关困难的先验信息。每个智能体在任何给定的时间只能估计一个特征,但是智能体可以本地传递它们的噪声估计以得到决策。该工作展示了一个分散的单特征决策算法和一个动态任务分配策略,该策略允许智能体在有限时间内锁定多个特征的决策。我们使用模拟和物理的Kilobot机器人验证了我们的方法。结果表明,一个集合可以正确地对多特征环境进行分类,即使在特征分配中存在病态的初始智能体。
Bayes Bots: Collective Bayesian Decision-Making in Decentralized Robot Swarms
Yaochu Jin团队-University of Surrey, UK
A Strategy for Self-Organized Coordinated Motion of a Swarm of Minimalist Robots
- 链接:检索网址,PDF地址
- 期刊时间:Trans2017
- 概要:极简机器人由于成本低、体积小,在功能上受到很大限制,但非常适合于群体机器人的应用。由于通信距离较短以及缺乏位置和方向感测,在最小群体机器人系统中保持连通性和避免碰撞具有挑战性。为了提高群体连通性,减少机器人之间的碰撞机会,提出了一种基于自组织的极简机器人群体聚集控制策略。基于协作建立的相对位置信息,每个机器人确定一个无碰撞的操作多边形。该调度方案通过将机器人分为一组静止机器人和一组移动机器人来协调机器人的运动,使得每个移动机器人都被作为信标的静止机器人包围。此外,我们在运动规划中引入了一种凝聚力,这在群体聚集过程中起到了重要的维持作用。提出了一种新的定量度量方法,用以度量群体智能体与局部通信的连通性,从而评价所提控制方案的性能。我们使用模拟的Kilobots进行了广泛的模拟,以检验不同噪声源和群大小对群的连通性和群聚速度的影响。最后,我们在一个真实的千机器人群上实现了所提出的算法,比较了有无所提出的协调集体运动控制策略下的群集性能。
Regulated Morphogen Gradients for Target Surrounding and Adaptive Shape Formation
- 链接:检索网址,PDF地址
- 期刊时间:TCDS2020
- 概要:在群体机器人学中,为自组织极简机器人开发算法已经成为一个热门的研究课题。与其他机器人不同,极简机器人可能无法自我定位,这使得完成诸如包围目标(其位置通常未知)等任务变得非常困难。在目标周围,到达目标并加入群并不总是导致目标的满意包围。此外,如果没有集体决策,个体的极简主义机器人是不可能找出群体的整体形状的。在本研究中,我们利用两种形态的扩散和反应来包围目标并形成圆形群。结果表明,该方法能够自适应地形成多个目标周围的形状。通过计算机仿真和使用kilobots的物理实验来评估该算法的性能。
其他团队
Collective decision with 100 Kilobots: speed versus accuracy in binary discrimination problems
- 链接:检索网址,PDF地址
- 期刊时间:AAMAS2016
- 概要:在不依赖于中心规划单元或全局通信的情况下,利用大量简单的智能体实现快速、准确的集体决策对于发展复杂的集体行为至关重要。在本文中,我们研究了二元判别问题背景下集体决策中的速度与精度权衡问题,即群体如何集体决定两个方案中的最佳方案。我们描述了一种新的、完全分布式的集体决策策略,它只需要具有最小能力的智能体,并且比以前的方法更快。我们在实验上评估了我们的策略,使用了100千个机器人群,并且我们在理论上研究了它,使用了连续模型和有限尺寸模型。我们发现,影响策略速度与准确性权衡的主要因素是智能体邻域大小,即与每个智能体共享当前观点的智能体数量。所提出的策略和相关的理论框架可用于设计在给定速度和/或精度水平上进行集体决策的群。
Emergence of Consensus in a Multi-Robot Network: from Abstract Models to Empirical Validation
- 链接:检索网址,PDF地址
- 期刊时间:IEEE Robotics and Automation Letters, 2016
- 概要:分散多智能体系统中的一致性动力学受到了广泛的研究,并提出和分析了几种不同的模型。其中,命名游戏以其简单性和适用于从符号学到工程的各种现象和应用而著称。尽管研究的范围很广,但在实际的分布式系统中实现理论模型并不总是简单的,因为物理平台施加了一些约束,这些约束可能会影响一致性动力学。本文研究了kilobot机器人平台命名游戏的实现效果,其中考虑了游戏的并发执行和物理干扰。根据机器人创建的不断发展的通信网络,分析了一致性动力学,强调了不同的区域在很大程度上取决于机器人的密度和它们在实验舞台上广泛传播的能力。我们发现物理干扰降低了机器人在一致性时间上的移动带来的好处,同时也降低了个体的认知负荷。
北航仿生自主飞行系统研究组(段海滨团队)
团队网站:北航仿生自主飞行系统研究组网站 (buaa.edu.cn)
参考
世界所有知名机器人介绍:All Robots - ROBOTS: Your Guide to the World of Robotics (ieee.org)