ROS中各种相机的驱动方式
普通USB摄像头驱动USB_CAM
原链接:https://github.com/ros-drivers/usb_cam.git
下载与安装
- apt安装
sudo apt-get install ros-melodic-usb-cam
- 或者:源码安装
#放入工作空间内
git clone https://github.com/ros-drivers/usb_cam.git
catkin_make
测试
注:测试之前请先使用 lsusb 查看摄像头设备,并使用 ls /dev 查看是否存在 /video0 设备
roslaunch usb_cam usb_cam-test.launch
Orbbec astra pro
下载与安装
目前官方文档说明支持 ROS Kinetic and Melodic.
注:进行以下操作的前提是已经安装好ROS
安装依赖
sudo apt install ros-$ROS_DISTRO-rgbd-launch ros-$ROS_DISTRO-libuvc ros-$ROS_DISTRO-libuvc-camera ros-$ROS_DISTRO-libuvc-ros创建一个 工作空间 (如果有可以跳过这一步)
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
source devel/setup.bash下载仓库到工作空间
cd ~/catkin_ws/src
git clone https://github.com/orbbec/ros_astra_camera创建 astra udev rule
roscd astra_camera
./scripts/create_udev_rules编译 astra_camera
cd ~/catkin_ws
catkin_make --pkg astra_camera
测试
注:确认工作空间的环境变量添加到了 /bashrc 中
- 启动摄像头
roslaunch astra_camera astrapro.launch
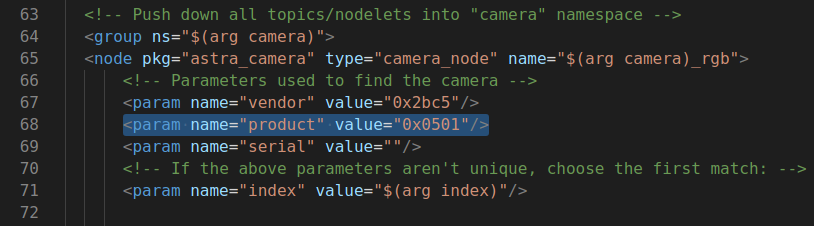
- 可能遇到如下问题,原因是astrapro.launch设备的ID号与自己电脑的不同。

- astrapro.launch文件中默认的设备的ID号为0x501。
- 使用
lsusb查看自己相机的设备号,如果看不出来就吧设备插拔看区别。
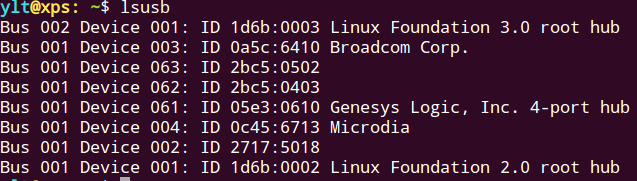
更改 astrapro.launch文件中的设备的ID号为0x502。

再次运行
roslaunch astra_camera astrapro.launch
- 没有报错,然后运行 rviz 添加pointcloud2 和 image 可以看到点云数据
rviz
